
- ELEKITのリモコンカー(JS-6105T)の仕組み
- 回路図を起こす際のポイント(ノードとエッジの考え方)
- スイッチの操作によるモーターの回転制御と車の動き
ELEKITという会社をご存じでしょうか?その名の通り、電気電子関連の工作キットの製作・販売を手掛けている会社で、子どもから大人まで楽しめる数多くのキットが取り揃えられています。
もう何年も前になりますが、いまでは販売終了となってしまった「牛乳パックリモコンカー(JS-6105T)」を購入したきり、ずーっと引き出しの中で温め続けていたものを、満を持して制作してみました。こんな感じです。

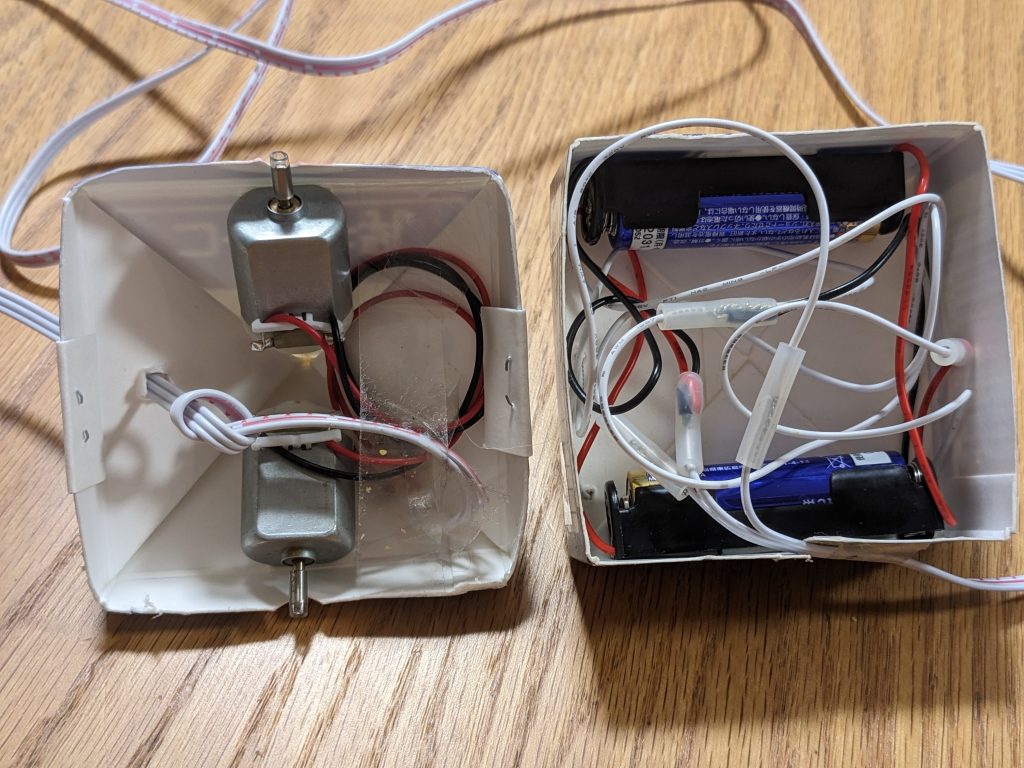
上の写真右側に写っている2つのスイッチを前後に倒すことで、下写真左側に写っている2つのモーター(タイヤ)の回転向きをコントロールして、車に見立てた牛乳パックを前後に動かしたり旋回させたりするというものです。
仕組みとしてはとても単純なものですが、配線するとそれなりにごちゃついてきます。そして、子ども向けに作られたものなので、説明書の中に回路図などの説明はなく、制作の具体的な手順が示されているだけです。なので、なぜ直進運動したり旋回したりするかというのは、ぱっと見ではよくわかりません。
そこで、まず回路図を起こしてどういう仕組みでモーターの回転をコントロールしているのかを確認するとともに、制作過程で学び得たこぼれ話を今回はシェアしたいと思います。
手順書の説明書きから回路図を起こしてみよう
ノードとエッジの概念で、部品と配線のつながりを整理する
はじめから整ったキレイな回路図を起こせれば理想ですが、なかなかそうもいかないので、とりあえず書き上げてから、後で整える、というつもりでいるのが良いと思います。
では、「とりあえず書き上げる」ためのポイントは何でしょうか。
そのためにはまず、「ノード」と「エッジ」という概念を押さえておくとよいでしょう。ノードとエッジというのは、グラフ理論という数学の理論で使われる用語で、ノードは節点、エッジはそれら節点間を結ぶ線分を指します。
さて、回路図を起こすときのポイントですが、部品や配線同士がつながっているノードを起点に考えると混乱が比較的少なくなってよいです。
当たり前ですが、実際の配線は直線でなく、ぐにゃぐにゃ曲がってたり捩れてたりします。なのでなんとなく複雑そうに見えてしまいがちなんですが、それに釣られて頭の中まで捩れてしまわないようには、ノードに着目することです。
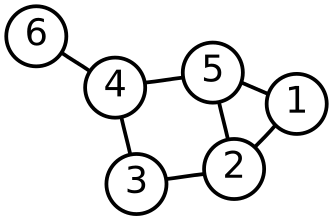
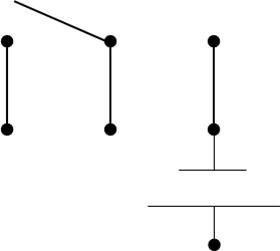
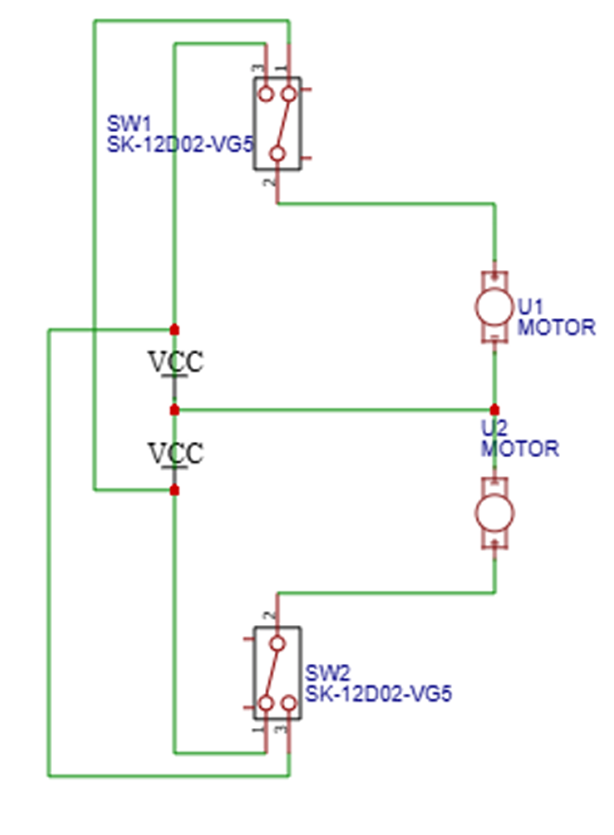
たとえば、冒頭の写真を再掲して、以下の赤矢印部に着目してください。
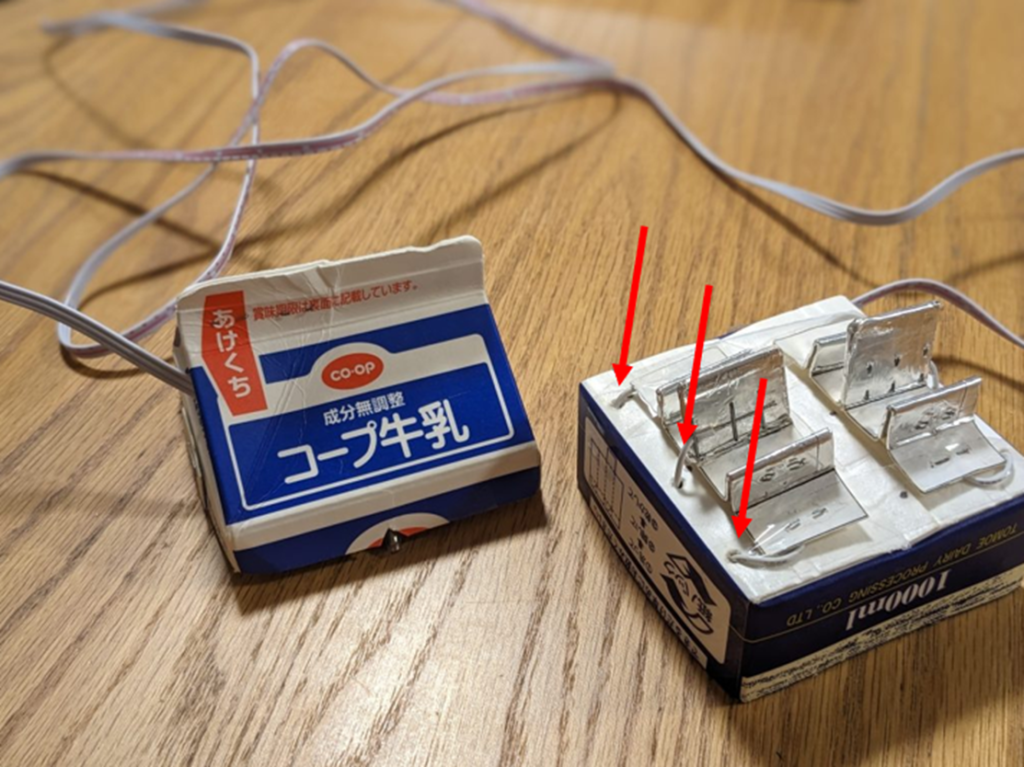
これらは、スイッチから引き出された3本の配線で、それぞれもちろんその先でどこかしらと接続されるんですが、いきなりそこまでを一気に考えないことがポイントです。
いったん、スイッチを出たところに、3つの点(ノード)があるという風に捉えるんです。こんな感じです。
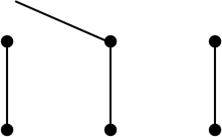
ちょっと面倒だったんで黒丸で描いてますが、本来は白丸で描きます。これがノード(節点)です。
「なにをこれだけのことを」と思われるかもしれませんが、ここ結構肝心です。このノードに対して、「何が」接続しているのかを把握することがポイントなんです。逆に言うと、「どうやって」接続しているかはいったん置いておこうということです。
先ほども書いたように、実際の配線を見ると、ケーブルが捩れたり曲がったり交差したりで、その配線の先がどこにどう行き着くかというのが意外にも気になってしまうものです。でも、実際には、「どことつながっているか」というのが肝心なポイントです。
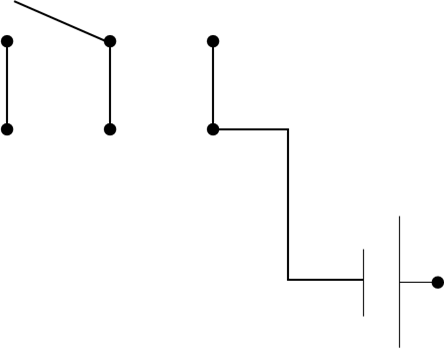
実際、リモコンカーの組み立て手順書には、図2の右側のコードを電池ボックスの黒のコードとつなぎ合わせるよう記載がありました。
それを描き表したのが次の図です。
(黒のコード)をつないだ回路図
電池の黒のコードというのは、マイナス側をつなぐということなので、電池の回路記号の線の短い側が接続されるということですね。
実際の配線の複雑さは一切反映させる必要なく、スイッチの右側のノードと、電池のマイナス側のノードを接続させる。これだけでいいのです。逆にこのノードの接続が合っている限りは、たとえば以下のように描いても同じことだということです。
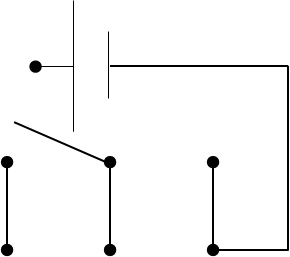
「スイッチの右側のノードと電池のマイナス側のノードが接続されている」というのはどれも同じだということがお分かりいただけるかと思います。その条件が保たれている限りは、回路図上はどのようにいじってもいいということです。これが、「どうやって」接続しているかはいったん置いておこうと言える根拠です。あとでいじればいいので。
対称性を上手く使って部品を配置する
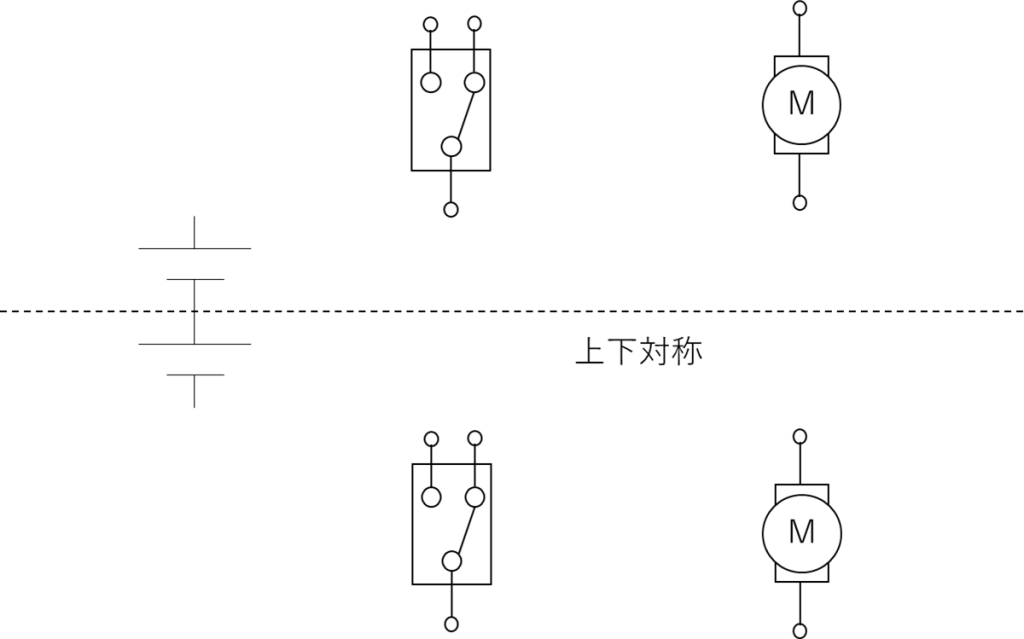
冒頭の写真から見て取れるように、このリモコンカーでは、直流モーターが2つ、電池が2つ、スイッチも2つ使われています。
これはたまたまなんですが、都合よくどの素子も2つ(偶数)使われているので、これを上手く使わない手はないです。
どういうことかというと、対称性のある回路図の完成を目指すということです。左右対称、もしくは上下対称です。これは好みがわかれるところかもしれませんが、基本的に電池はプラス側を上、マイナス側を下に向けて配置するのが自然なので、直列接続した2つの電池を(このリモコンカーは2つの電池を直列につないでます)回路図上で縦に配置するとなった時点で、上下対称の回路図になるだろうと予想がつきます。こんな感じです。
その上で、ノードとノードのつながりに注意しながらつないでいけば、回路図が組みあがります。ELEKITの組立手順書をそのまま転載するわけにはいかないので、以降の詳細は割愛しますが、出来上がりはこうなりました。
モーターの正転・逆転のコントロール
それでは、先ほどの回路図を使って、スイッチングパターンによってモーターの回転をどうコントロールできるのか、みていくことにしましょう。
スイッチは2つあって、それぞれスイッチの入れ方が2通りずつあります。つまり、全部で4通りのスイッチの入れ方があります。それぞれについて、どういう経路で電流が流れて、モーターの回転がどうなるかを見ていくことにします。
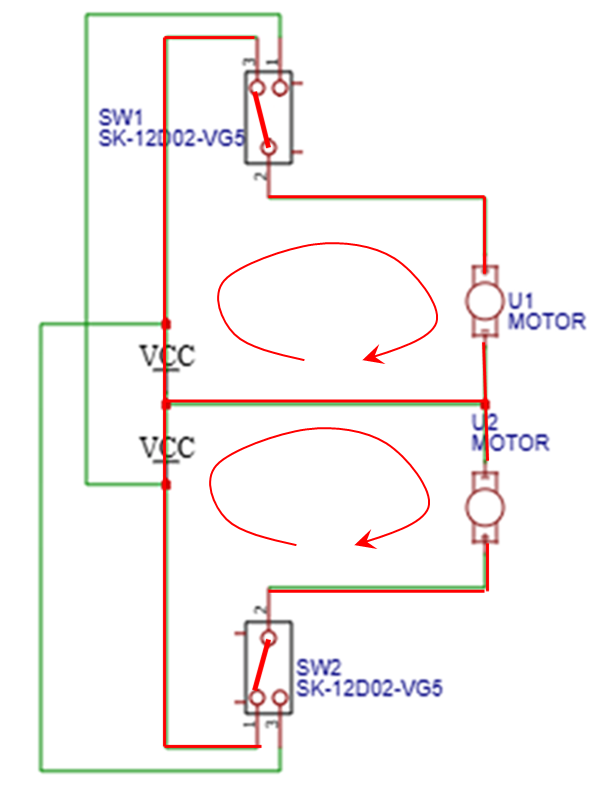
まずはこちらです。赤線が電流の通り道です。ループが2つ描かれていますが、この電流経路によって、モーター${U_1}$と${U_2}$がそれぞれ回転します。緑線には電流は流れません。これは、スイッチ部分で経路が途切れているからですね。
モーター${U_1}$と${U_2}$にどちらの向きから電流が入ってくるかに注意してください。この図でいうと、どちらも上から入って下側に抜けていくのがわかると思います。これが、他のスイッチングパターンではどうなっていくか、注意してみていきましょう。
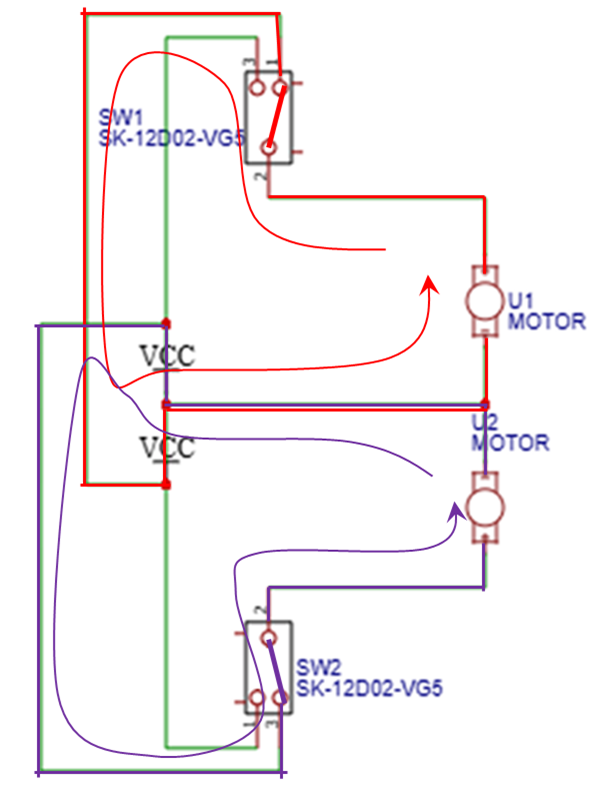
2つともスイッチを逆側に入れた場合です。今度は、いずれのモーターも、下から上に電流が抜けていくのがわかると思います。
他に2パターンスイッチの入れ方があるわけですが、いま見た2つの組み合わせになりますね。
モーターは、入れる電流の向きを変えると、回転が逆になります。つまり、下表のように、モーターの回転方向の組み合わせを4通り再現することができることになります。
| スイッチングパターン | モーターU1の電流向き/回転向き | モーターU2の電流向きと回転向き | リモコンカーの動き |
| 1 | 上→下/正転 | 上→下/正転 | 前進 |
| 2 | 下→上/逆転 | 下→上/逆転 | 後進 |
| 3 | 上→下/正転 | 下→上/逆転 | 旋回 |
| 4 | 下→上/逆転 | 上→下/正転 | 旋回(3と逆向き) |
まとめ
ELEKITのリモコンカー組み立てをケーススタディとして、シンプルなスイッチとモーターの制御について学びました。回路図を起こす際には、ノードとエッジの概念を使うと整理しやすくなります。また、スイッチの組み合わせによってモーターの回転方向が変わり、前進・後退・旋回が実現できる仕組みが理解できます。これを応用すれば、リモコンカーやちょっとした船を自作できそうですね!

